Vor ein paar Monaten habe ich einen Bausatz mit Legosteinen gebaut, um Zeit und Geschwindigkeit zu messen. Ich hatte 3 Messpunkte. Ein Maß dann ein weiteres Maß weiter legen und ein paar cm weiter ein Drittel. Dadurch war es möglich, die Zeit für einen 1-Meter-Start aus dem Stand zu messen und die Geschwindigkeit auf 1 Meter zu bringen.
Ich habe es auch verwendet, um die Höchstgeschwindigkeit des Autos bei starker Fahrt zu messen.
Das Setup war etwas veraltet, nicht einfach bei jedem Setup anzupassen und nur 3 Sensoren entlang der Strecke. Also habe ich darüber nachgedacht, das System zu verbessern!!!
Ich habe vor einiger Zeit etwas dafür bestellt, hatte aber keine Zeit. Im Moment habe ich etwas mehr Zeit und habe mich mit den Komponenten und dem Code befasst.
Erste ermutigende Tests.

Für diesen Test habe ich den einfachen Weg gewählt, ich habe schnell die erste Schaltung des Sohnes aufgebaut.
Ich habe einen Raspberry Pi an eine Platine angeschlossen, um die Anschlüsse zu verteilen.
Daran angeschlossen habe ich ein Relais, eine 3-LED-Ampel, einen Temperatur-, Hydrometrie-, Luftdrucksensor und 2 Platinen mit 4 Infrarotsensoren.
Ich habe also 8 Fahrzeugerkennungspunkte.
Ich habe 4 Punkte auf jedem weißen Streifen (elektrische Rutschen), den wir oben auf der von den Büchern gehaltenen Schiene sehen.
Abstand der Messungen: 10 cm, 20 cm, 10 cm und 20 cm, weiter auf dem zweiten Streifen: 10 cm, 20 cm, 10 cm. Abstand zwischen dem 1. und dem letzten Sensor: 1 Meter
Zoom auf den Mini-PC und das Board:
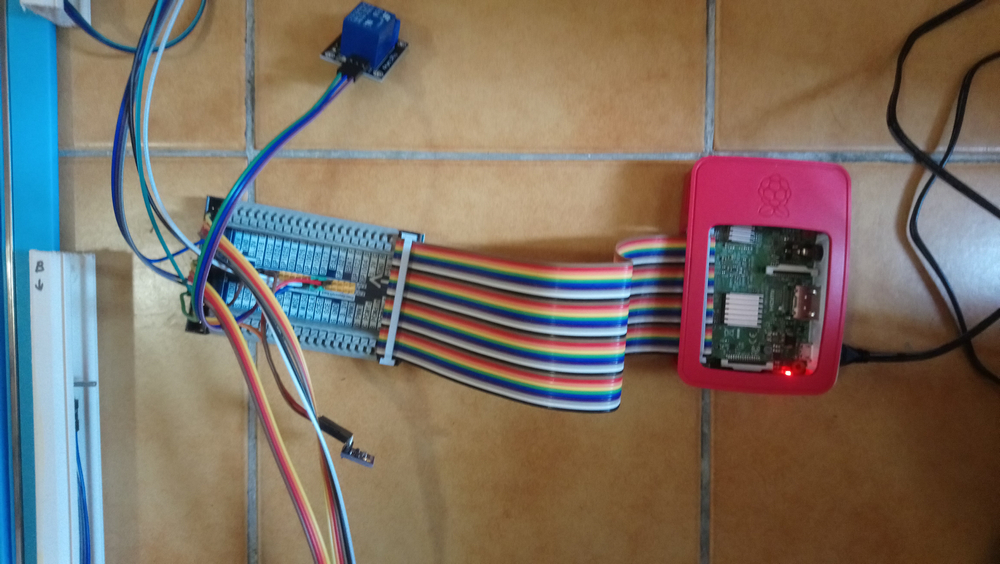
Oben sehen wir das Relais (blau), mit dem Sie einen Controller anschließen können, um die Kontrolle über das Auto zu übernehmen. Und unten der T°-, Hygrometrie- und Druck-(Wetter-)Sensor
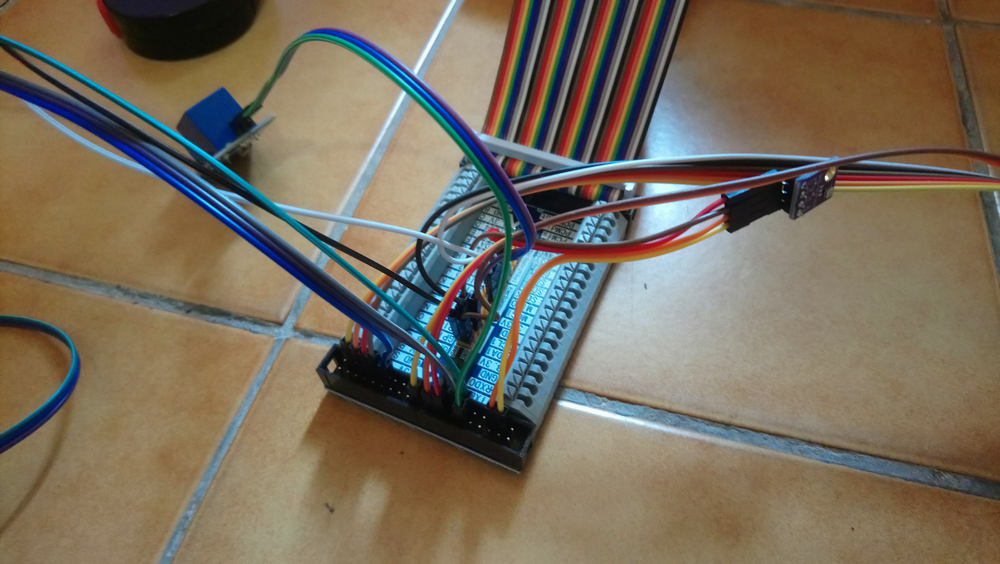
Eine andere Ansicht:
Die Platine, die die 4 Fahrzeugpräsenzsensoren verwaltet:
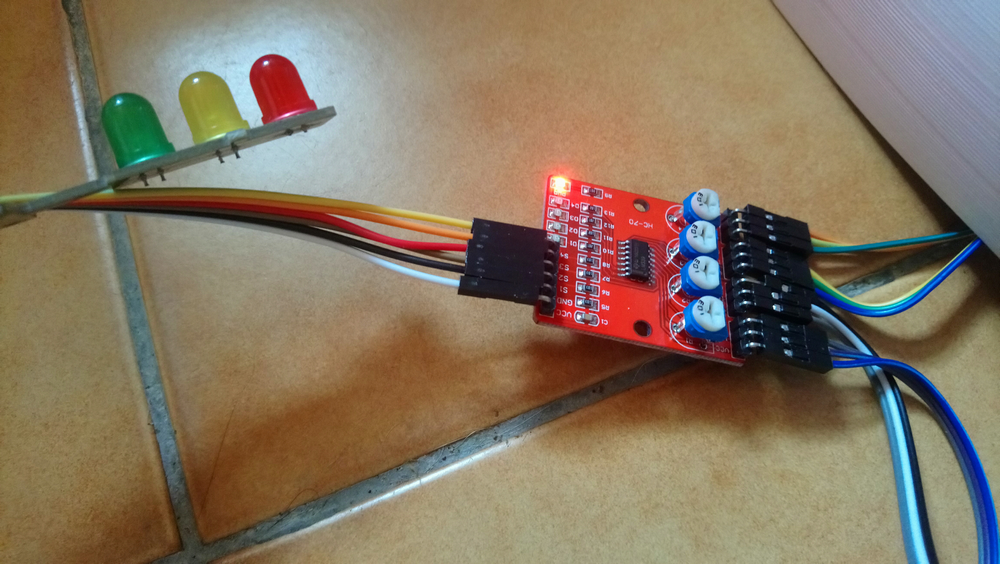
Oben sehen wir die Ampel
Die Sender- und Empfängerdioden links von den Schrauben:
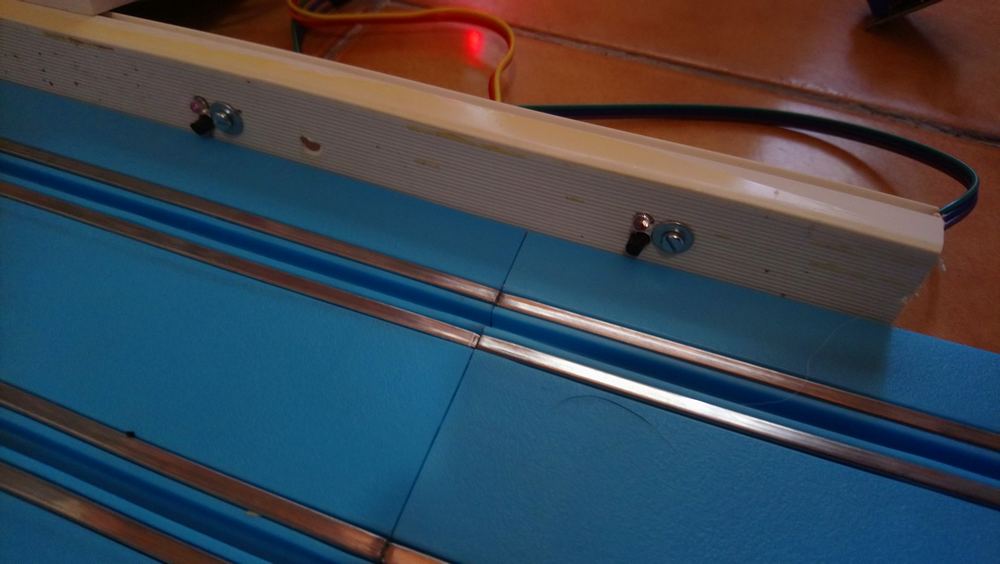
Es ist an einem Stromkanal befestigt
Ansicht von hinten:

Budget für elektronische Geräte:
Ohne Himbeere: ca. 10 €
Ich habe die 4 First-Autos getestet.
Ich habe die vom Programm generierte Textdatei abgerufen, eine schnelle Suche in Excel durchgeführt und da haben Sie sie:
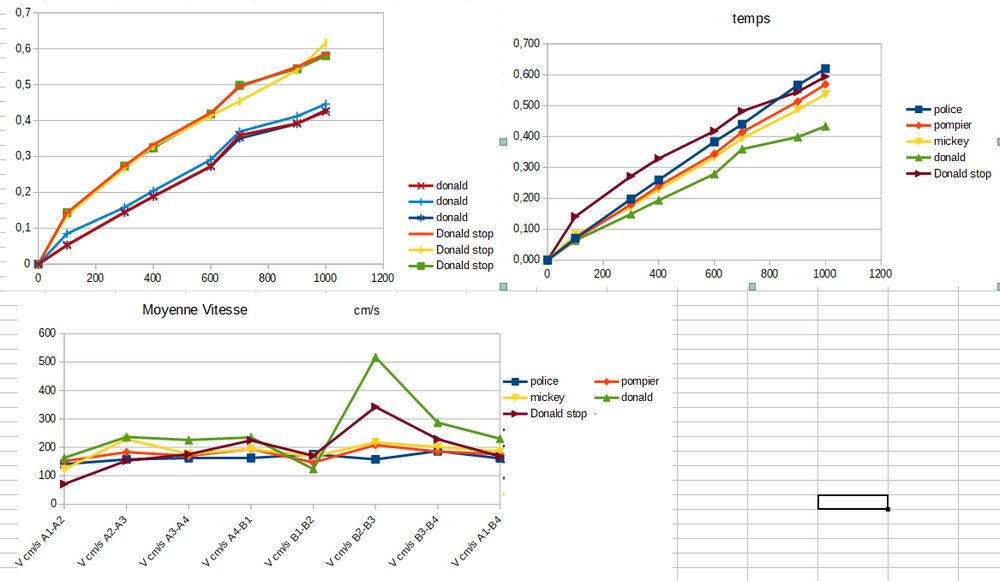
Ich habe das Donald-Auto in zwei Konfigurationen getestet, wie die anderen, rollender Start, Vollgas und einmal Halt beim ersten Sensor. Bei jedem Test werden drei Versuche durchgeführt, um einen Durchschnittswert zu ermitteln und mögliche Fehlmessungen auszuschließen
Die Kurve oben links ist die von Donald, sie ist gemessen recht regelmäßig.
Ich muss ein Problem mit der Ablesung in Zone B2-B3 haben, da ich auf jeder Kurve in dieser Zone einen Versatz habe. Der Sensor darf das Fahrzeug nicht auf gleicher Höhe erkennen, was den Unterschied nur bei bestimmten Fahrzeugen erklärt.
Entdecken Sie bald den Test auf der GO-Strecke.