Aufbauend auf dem ersten Test mit First-Autos habe ich den Code verbessert, um das Testen zu vereinfachen und mögliche Sensorausfälle zu erkennen. Heute habe ich mit Carrera GOs getestet.
Die Teststrecke:
eine gerade Linie bestehend aus 9 „C“-342-mm-Schienen + der Startschiene, 180°-Kehrtwende mit 2 „G“-Schienen und gerader Linie, dann Kehrtwende.

Ungefähr 40 cm nach dem Beginn der Geraden finden wir das Messgerät mit den Maßabständen: 10 cm, dann 20 cm, 10 cm, 20 cm, 10 cm, 20 cm und 10 cm
Abstand zwischen 1. und 8. = 1m
Liste der für diesen Test ausgewählten Fahrzeuge. Ich habe versucht, Fahrzeuge aus verschiedenen Kategorien auszuwählen:
| Referenz | Bezeichnung |
| 61037 | MarioKart – Mario |
| 61169 | Volkswagen Race Tuareg 2 Rally Dakar 2009 |
| 61178 | F1 Renault R30 Showcar 2010 |
| 61195 | Finn Mcmissile |
| 61268 | Mario Kart 7 – Yoshi |
| 61274 | AMG Mercedes C-Coupe DTM Jamie Green, No.5 |
Test 1: Start stoppt, Start des Turbos gesteuert durch ein vom PC gesteuertes Relais. Turboabschaltung beim Passieren des letzten Sensors in 1 m Entfernung.
Test 2: Wir platzieren einen 9. Sensor ganz am Anfang der Geraden am Ende der Kurve. Wir starten von der gegenüberliegenden Geraden, passieren die Kurve und der Sensor am Kurvenausgang schaltet das Turborelais ein. Etwa 40 cm weiter passieren wir das Gerät mit 8 Sensoren. Am letzten Sensor angekommen schaltet der Turbo ab.
Für Test 1 habe ich mich aus Neugier dazu entschieden, eine neue Messung durchzuführen, ich nenne es Bremsleistung. Dies bedeutet, dass beim letzten Sensor die Stromversorgung komplett unterbrochen wird. Ich werde daher den Bremsweg messen, also zwischen dem letzten Sensor und dem anhaltenden Auto.
Jeder Test wird dreimal durchgeführt, um die Daten zu validieren und mögliche Fehlmessungen auszuschließen.
Ich habe 5 Autos getestet, aber ich werde nur die Ergebnisse eines Autos veröffentlichen, 61274: AMG Mercedes C-Coupé DTM Jamie Green, Nr. 5
Test 1 stehender Start
Hier sind die Kurven der 3 Tests
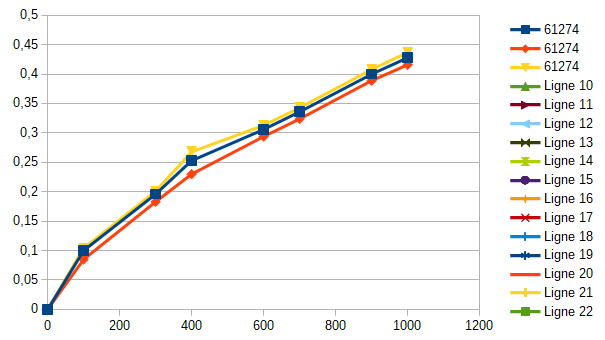
Wir sehen, dass die drei Kurven im Trend sehr nahe beieinander liegen
Ich nehme den Durchschnitt der drei Kurven und betrachte nun den Trend aus mathematischer Sicht
Mal sehen, ob es eher linear ist?
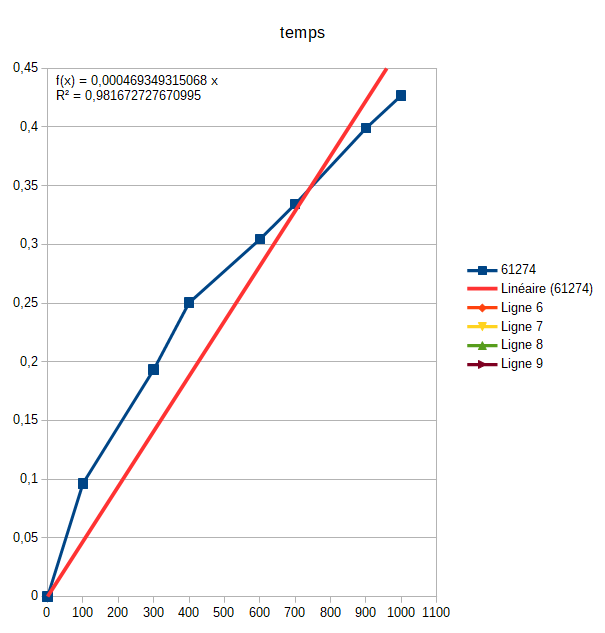
Nicht wirklich, also logarithmisch?
Grad 2:
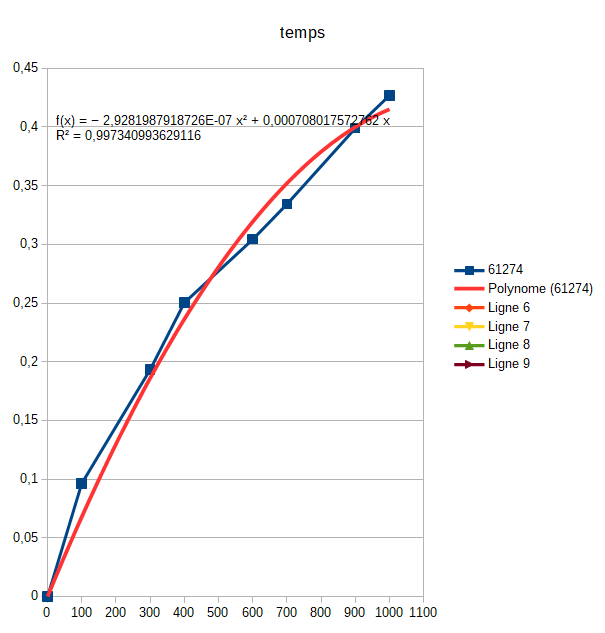
besser, der Bestimmungskoeffizient R2 ist besser (idealerweise gleich 1)
Grad 3:
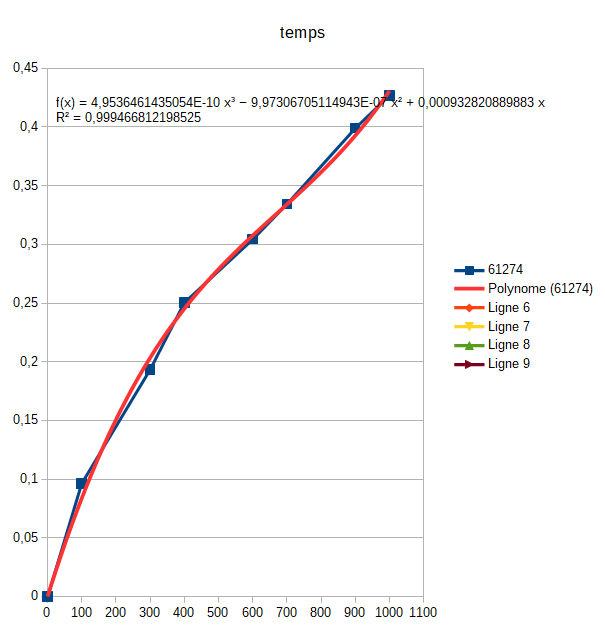
Wir sind nicht schlecht
Ich habe Level 4 geschafft, aber der Gewinn ist sehr gering
Zu Ihrer Information, der Bremsweg beträgt 88 cm, aber ich werde zu diesem Punkt bald einen zusammenfassenden Beitrag verfassen. Bei den 5 Autos geht es von 88cm auf 187cm!
Testergebnis 2: rollender Start
Für jeden Abschnitt berechnen wir die Geschwindigkeit
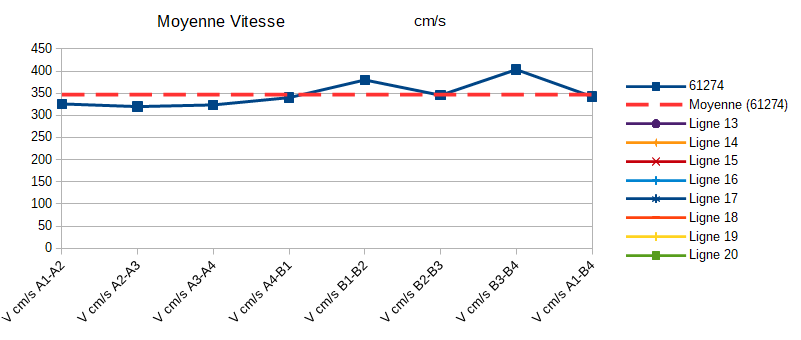
es ist ziemlich konstant
Wenn wir die Zeit entsprechend der Distanz während der 1 m anzeigen:
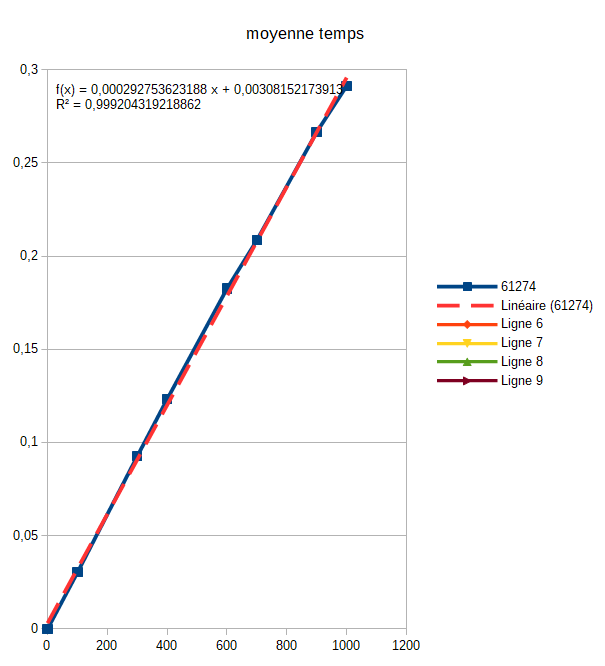
Die lineare Trendkurve zeigt einen schönen R2 von 0,999, was sehr gut ist
Zusammenfassung:
Start stoppt wir haben den Eindruck, dass wir in etwa 50 cm praktisch die Höchstgeschwindigkeit erreichen, die 1 m in weniger als 0,5 Sekunden verschlingt
Beim rollenden Start gibt es keine großen Geschwindigkeitsschwankungen. Der 1m wird in weniger als 0,3 Sekunden verschluckt
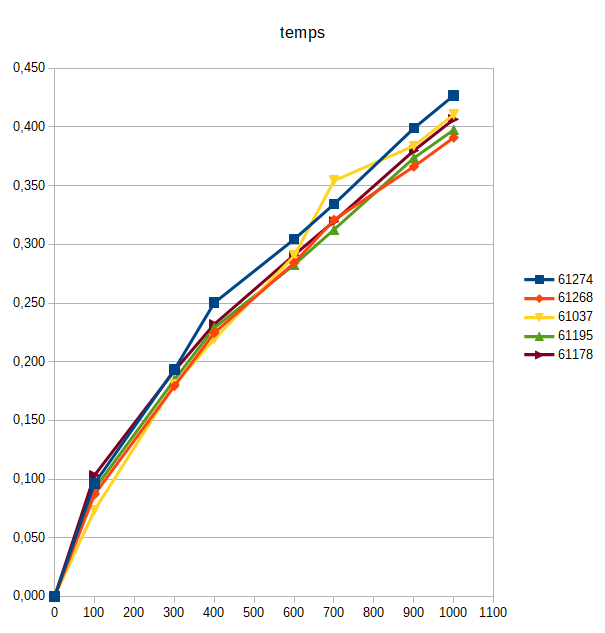
Hier sind die Kurven der 5 Autos im 1-m-Stehstart
In der Tabelle unten sind links die Testdaten und rechts das Berechnungsergebnis aufgeführt.
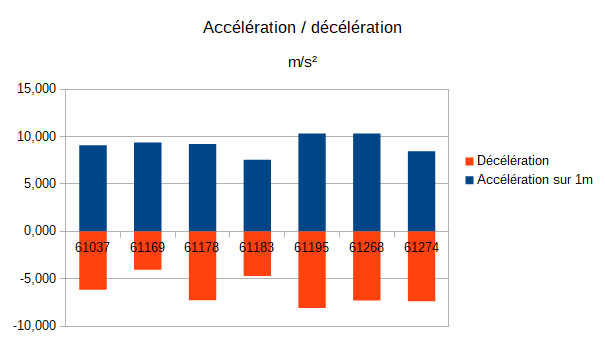
Es erfolgt die Berechnung der Beschleunigung aus dem Stand über 1m. Dann habe ich anhand der nach dem Abschalten der Stromversorgung zurückgelegten Strecke die Verzögerung (oder das natürliche Bremsen) berechnet.
Zu Ihrer Information habe ich das Bremsverhältnis im Vergleich zur Beschleunigung (Balance) berechnet.
Aus Neugier habe ich auch die kinetische Energie berechnet, die Masse und Geschwindigkeit als Parameter hat, um zu sehen, ob es einen Zusammenhang gibt. Auf den Grafiken ist nichts offensichtliches. Es reichen nicht die Maße aus, um zu sagen, dass es keinen Link gibt, als um zu sagen, dass es einen möglichen Link gibt.
| unité | s | cm/s | g | cm | cm/s | Joules (J) | m/s² | g | m/s² | g | % | |
| Fahrzeug-Ref | Zeit für 1m | Geschwindigkeit auf 1m | Masse | Bremsweg | Geschwindigkeit gestartet | Kinetische Energie bei 1m | Beschleunigung über 1m | Beschleunigung über 1m in G | Verzögerung | Verzögerung in G | Brems-/Beschleunigungsbalance | |
| 61037 | 0,411 | 374 | 40 | 114 | 404 | 0,280 | 9,100 | 0,928 | 6,135 | 0,625 | 67% | |
| 61169 | 0,414 | 388 | 44 | 187 | 422 | 0,331 | 9,372 | 0,955 | 4,025 | 0,410 | 43% | |
| 61178 | 0,407 | 375 | 33 | 97 | 391 | 0,232 | 9,214 | 0,939 | 7,249 | 0,739 | 79% | |
| 61183 | 0,46 | 348 | 50 | 129 | non testé | 0,303 | 7,565 | 0,771 | 4,694 | 0,478 | 62% | |
| 61195 | 0,397 | 410 | 33 | 104 | 420 | 0,277 | 10,327 | 1,053 | 8,082 | 0,824 | 78% | |
| 61268 | 0,391 | 404 | 34 | 112 | 442 | 0,277 | 10,332 | 1,053 | 7,286 | 0,743 | 71% | |
| 61274 | 0,425 | 360 | 44 | 88 | 400 | 0,285 | 8,471 | 0,863 | 7,364 | 0,751 | 87% |
Beschleunigungs-/Verzögerungsdiagramm:
Nächster Schritt:
mehr Daten haben.
Technisch gesehen habe ich noch Anschlüsse am Rechner, um eine dritte Rampe hinzuzufügen, ich muss das Modul bei Ali bestellen!
Verfeinern Sie die Erkennung bestimmter Sensoren. Ich denke, einige sind nicht so ausgerichtet wie die anderen. In bestimmten Branchen erklärt dies die Unterschiede.
Suchen Sie nach neuen Testideen.